TLDR : Tesla最近展示了其人形机器人Optimus执行复杂的舞蹈动作。根据Tesla Bot部门副总裁Milan Kovac的说法,该机器人完全在模拟中进行了训练,无需在现实世界中额外训练,这为各行业的实际应用开辟了新的前景。
目录
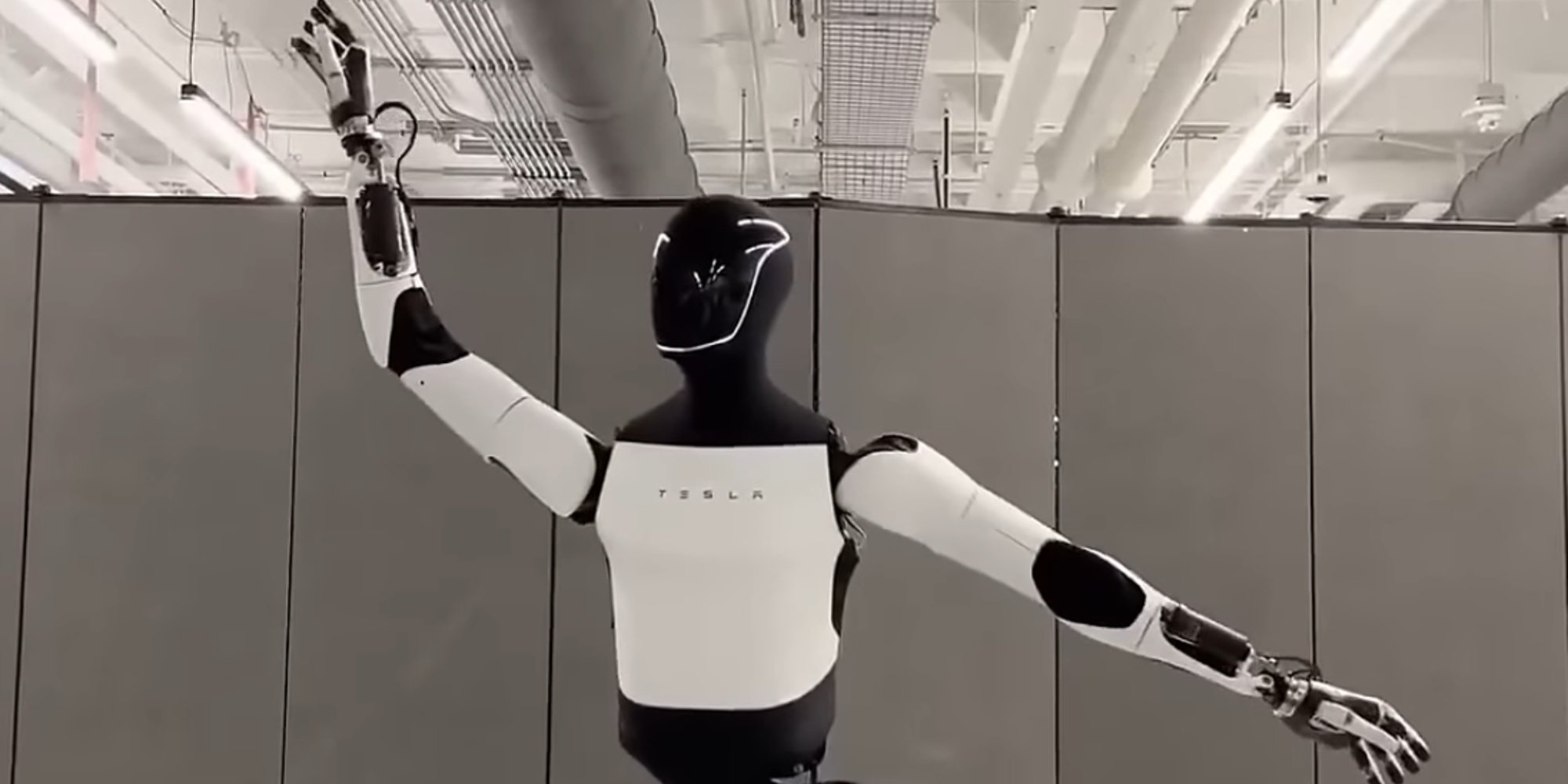
Tesla最近通过其人形机器人Optimus的两次令人印象深刻的演示引起了公众的关注。这些表演,包括复杂的舞蹈动作,是由Tesla Bot部门副总裁Milan Kovac在X上揭示的。
这些演示不仅展示了机器人的技术能力,也突出在人工智能和机器人技术领域取得的进展。第一次演示展示了Optimus执行有节奏的动作,而第二次演示由Elon Musk在社交网络X上分享,展示了机器人执行芭蕾和现代舞步,展现出真正的灵活性。
模拟训练和无额外训练的迁移
这些演示的一个核心方面是用来训练Optimus的方法。根据Milan Kovac的说法,机器人的动作完全是在模拟中学习的,这是一种允许在虚拟环境中测试和优化算法的技术,然后再在现实世界中部署。这种方法称为零次迁移,这意味着一旦模型被转移,就不需要额外的训练。与这种方法相关的挑战包括需要在模拟中完善机器人模型,以确保在现实中实现流畅和精确的性能。领域随机化和灵活的身体控制方面的创新是一些进展的例子,这些进展使Optimus在第二次演示中能够不依靠电缆完成这些复杂的动作。
模型改进和未来展望
Optimus的演示不仅仅是简单的艺术表演;它们揭示了Tesla机器人模型的显著改进。Kovac提到了一些有助于机器人稳健性和灵活性的能量配置文件调整和硬件改进。这些技术进步为在多个行业中的实际应用开辟了道路,从物流到个人助理。通过展示其在汽车行业之外的创新能力,Tesla定位为应用AI开发中的关键参与者。这些进步可能会改变人们对Tesla的看法,也可能改变专业领域中机器人技术的未来。
Pour mieux comprendre
什么是领域随机化,它如何助力像Optimus这样的机器人的训练?
领域随机化是在人工智能中使用的一种技术,通过随机改变虚拟环境的参数来训练更强健的模型。这种方法使得像Optimus这样的机器人能够适应现实世界中的意外变化,从而提高模拟训练模型的泛化能力。